| 产品特性:惯性测量 | 品牌:XSens | 型号:MTI-100-IMU |
| 传感器类型:IMU | 传感轴:3轴 | 感应范围:8°/h |
| 精度:0.2? | 输出类型:CAN,RS232,UART | 系列:MTI-100-IMU |
| 电源电压:5V | 电源电流:3.2mA | 封装/外壳:模块 |
| 特性:数字输出 | 端接类型:底座安装 | 工作温度:125℃ |
| 最小包装数:1 | 应用领域:测量仪器 |
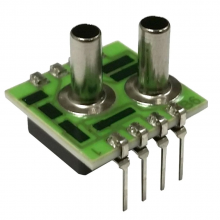
XSens建筑机器人惯性导航模块MTI 100 IMU(MTI-100-2A5G4)

传感器是第四代 MTis,可提供基于 MEMS 的可靠 AHRS、VRU、 IMU,并且为这些产品设立了
***标准。MTi-10 系列产品为系统提供三种不同的集成度选择(IMU, VRU 或 AHRS)。MTi-10 系列和高性能
MTi 100 系列具有多种共同的机械、电气和通信/API 接口,可广泛应用于 3D 运动跟踪,轻松进行集成。
MTi是一个集成GPS信号的微型惯性测量系统。通过内部微处理器的处理,输出姿态和航向信息。内部处理器
功耗低,通过实时卡尔曼滤波来提供准确的位置和速度信息。同时也提供无漂移的GPS增强型的三维定位信息
,以及较核过的三维加速度、三维转速度、三维地磁场、静态压力信息。对于导航,车辆和其他物体的控制
MTi是一款性能优越的测量单元。
传感器融合算法:MTI 10系列的定向计算采用了经过验证的Xsens卡尔曼滤波器(XKF3i)的传感器融合算法。
而MTI-100系列使用Xsens评估引擎(XEE)估计方向和位置,为一款功能强大的工具,超越了传统的卡尔曼
滤波的传感器融合算法。更为灵活,并且能够更好地处理测量离群或畸变项。
MTI-10系列提供三个集成水平型号:一个IMU,一个VRU和一个AHRS。10-IMU提供传感器数据,也可提供
delta_q和delta_vel数据。产品采用MTI***信号处理管道,为用户设计自己的融合滤波算法提供了一个高性
能的设备。20-VRU除MTI传感器数据外,还提供重心参考横滚和俯仰,以及无参照方向。30-AHRS AHRS为一款
全3D设备,同样提供参考磁航向。
信号处理通道
MTI-10系列产品全部采用了相同的***的信号处理管道,加速度计带宽高达375赫兹,陀螺仪高达415赫兹。
10千赫的过采样率和一个衰减陡峭的低通数字滤波器,确保高抗振动性能。圆锥和划船补偿运行达到***的
2千赫。所有内部传感器配有一个内置的自检。
卡尔曼滤波
XKF3i为成熟的传感器融合算法,提供MTI-20 VRU和MTI-30 AHRS高可靠性能的方向。发散监测器是XKF3i的一个
重要组成部分,确保即使在加速度和磁场扭曲下也会保持正确的方向。XKF3i自带多个过滤器设置配置文件,在
特定的条件和环境下使用。
硬件设计
MTI-10系列提供两款不同外型的版本。封装防护等级为IP67,9针高品质的推拉式连接器提供用户友好的安装与
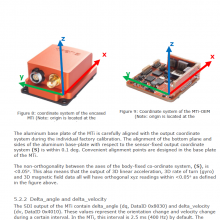
连接。铝阳极氧化外壳(57x42x23毫米)提供7个对齐孔位,以确保准确的安装。 9针连接器采用串行连
接、USB连接和3个GPIO。对于需要更高灵活性的客户,还可以选择24针的OEM板,尺寸为37x33x12毫米,重
量只有11克。MTI-10系列和高性能的100系列(包括MTi-G)的所有产品完全可以互换,无需软件或硬件的更换
惯性导航 惯性导航 惯性导航 惯性导航
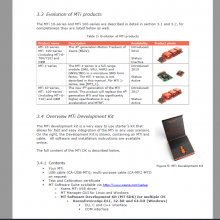
其他可供应产品
MTi 10 系列
MTi 10 IMU (MTI-10-2A5G4)
MTi 20 VRU (MTI-20-2A5G4)
MTi 30 AHRS (MTI-30-2A5G4)
MTI 100 系列
MTI 100 IMU(MTI-100-2A5G4)
MTI 200 VRU (MTI-200-2A5G4)
MTI 300 AHRS(MTI-300-2A5G4)
MTI 710 GNSS/INS (MTI-G-710-2A5G4)
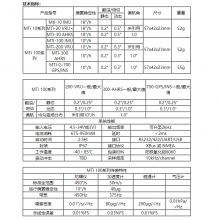
陀螺仪
满量程:2000度/秒
零偏稳定性:10?/h
带宽:255Hz
噪声密度:0.007 ?/s/√Hz
重加速度影响:0.001 ?/s/g
加速度传感器
满量程:16g
零偏稳定性:30 μg
带宽:324 (x,y) 262 (z) Hz
噪声密度:120 μg/√Hz
磁传感器
满量程 +/- 8 G
全部 RMS
噪声 0.5mG
非线性 0.2%
分辨率 0.25mG