| 产品特性:磁阻套件 | 品牌:PNI | 型号:HRS-12960 |
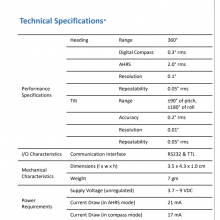
| 传感器类型:数字罗盘 | 功能类型:GPS定位 | 感应范围:360° |
| 工作点(BOP):0.3° | 释放点(BRP):2.0° | 系列:HRS-12960 |
| 输出类型:数字 | 电源电压:5V | 电源电流:18 |
| 安装类型:PCB | 封装/外壳:SMT | 工作温度:125℃ |
| 最小包装数:1 | 应用领域:测量仪器 |
可用于自动驾驶汽车 PNI Sensor推出新型定位模块TRAX2 PN12960

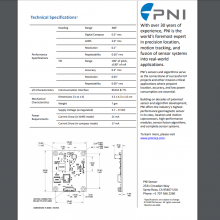
PNI Sensor宣布推出新型定位模块TRAX2,该模块是少有一款提供两种模式的定位模块,即姿态和航向参考系统
(AHRS)或数字罗盘。其具备的双模式功能能够使其应用于无人机、机器人、自动驾驶汽车、海洋浮标等等领
域。PNI Sensor公司是在准确定位、运动追踪和将传感器系统融合进真实应用方面的研究者。
TRAX2集成了PNI公司的磁场传感器、经过验证的传感器融合和数字罗盘算法,即使在苛刻的条件
下,运动发生动态变化而且局部磁场发生变化的情况下,该模块都能提供准确的航向和方向。
定位模块
TRAX2模块的功能包括:
1、AHRS模式结合了PNI的15状态卡尔曼滤波器(15 state Kalman filter)以及可供用户进行调节的按钮,为
特定应用和条件优化算法;
2、陀螺稳定罗盘,以提高动态精度;
3、低延迟、无超调、快速获取目标;
4、多种校准方法,确保该模块在工业、科学、海洋和军事应用,如无人机(UAV)、无人地面车辆
(无人驾驶车,UGV)以及无人水下车辆(UUV)等应用领域的定位准确性。
TRAX2集成了PNI的军用级磁传感器,并已证明传感器融合与数字罗盘提供准确的算法方向和方向没有GPS辅助。
关键任务应用程序需要准确在任何环境中,无论移动还是静止或者没有GPS。航向可以用一个磁性清洁的数字
罗盘移动时使用环境或GPS。
TRAX2是其类中少有一个持续校正陀螺仪漂移,并提供无任何附加输入的航向比如GPS。它的磁异常
拒绝算法自动隔离来自其他杂散磁场的地球磁场在任何环境。
特点和优点
?在苛刻的情况下,准确的航向环境:室内、室外、地下树冠,在峡谷中,移动的还是静止的
?优化的SWaP-C,提供***的设计灵活性
?AHRS模式包含PNI的15状态Kalman带用户可调旋钮的过滤器
特定应用和条件
?多种校准方法确保准确性广泛应用于工业、科学、海洋等领域以及军事应用
?不含ITAR
RM3100套件尺寸(长×宽×高)
MagI2C 4.0×4.0×0.75mm pn13156
Sen-XY6.0×2.1×2.2mm pn13104
Sen-Z 3.0×3.0×5.75mm pn13101
PNI地磁传感器型号:
RM2000 SPI接口 双轴套件
RM3000 SPI接口三轴套件
RM2100 SPI接口 、I2C 双轴套件
RM3100 SPI接口、I2C 三轴套件
RM3101 AGV套件 SEN-Z (13101) Z轴传感器 SEN-XY (13104) XY轴传感器 MagI2C (13156) 驱动芯片
MS2100 SPI接口
RM3000评估板
RM3100评估板
RM3100评估板(无插针)
PNI电子罗盘
TargetPoint DMC 三轴 ±90°/±180° 精度0.5°rms
TCM2.5 三轴 ±50° 精度0.8°rms
TCM2.6 三轴 ±50° 精度0.8°rms
PRIME 三轴 ±90°/±180°精度<2°rms
TCM-XB 三轴 ±90°/±180°精度0.3°rms
TCM3 三轴 ±80° 精度0.5°rms
TCM5三轴 ±90°/±180° 精度0.3°rms
SeaTRAX 三轴 ±90°/±180° 精度0.3°rms
TRAX 三轴 ±90°/180° 精度0.3°rms
TRAX2 三轴 ±90°/180° 精度0.2°rms
TCM-MB三轴 ±90°/180° 精度0.3°rms
PNI磁力计
MicroMagIC 三轴 ±1100uT 精度0.015uTSPI
V2XE 两轴 两轴 ±1100uT 精度1°rmsuT SPI 磁传感器套件